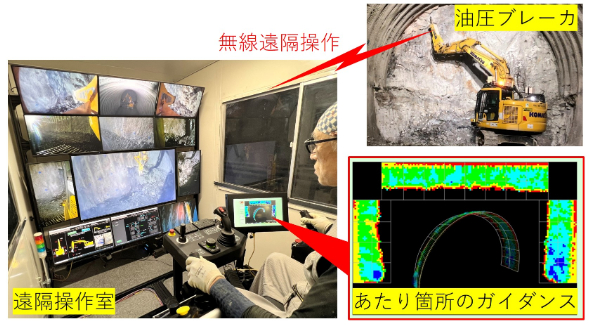
山岳トンネル工事における油圧ショベルの一連の作業を無人化
本システム『Tunnel RemOS-Excavator(トンネルリモスエクスカベータ)』を活用することにより、油圧ブレーカの走行から切羽でのコソクやあたり取りまでの一連の作業を無線で遠隔操作することが可能です。切羽におけるあたり取り時のガイダンスシステムとして『切羽掘削形状モニタリングシステム』を装備しており、キャビン上の高速3Dスキャナによる切羽掘削形状の計測結果と設計断面の比較を基に、あたり箇所がモニタ上にヒートマップ表示されます。トンネル掘削作業の完全無人化の早期実現を目指して構築を進めている自動化・無人化施工技術『Tunnel RemOS(トンネルリモス)』の要素技術です。