非GPS下のドローン自律航行と深層学習を活用したダム堤体劣化調査
ダム堤体表面の劣化調査(コンクリート表面ポップアウト、フィルダム表面リップラップ劣化)は目視で実施されており、点検技術者の力量差による評価のばらつきや見落としによる点検精度や再現性、堤体全体での損傷分布や損傷サイズ把握,高所作業リスク等の複数の課題を有しています。
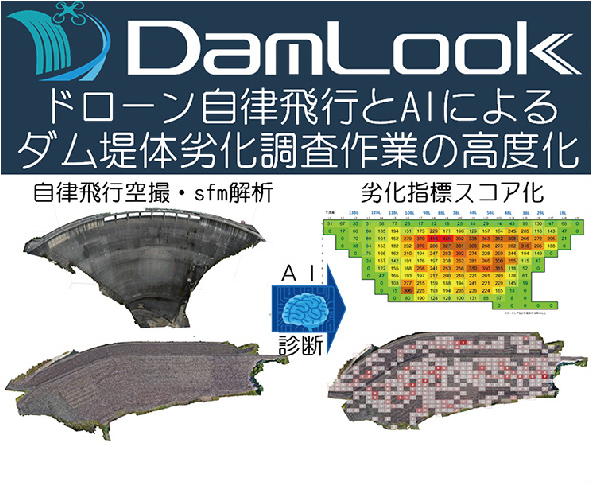
本技術は、「ダム堤体近接の非GPS環境下におけるドローン自律航行技術」と「AIによる劣化情報自動検出技術」にて、ダム堤体全体の損傷状況や傾向の客観的・定量的把握を可能とします。これにより調査日数・点検作業時間の大幅な短縮、点検内容の高度化が期待できます。
また本技術は、ダム堤体以外のコンクリート構造物への適用も可能です。